
BioTac – Biomimetic Tactile Sensor
 Researchers at the University of South Carolina (USC) Viterbi School of Engineering have designed a robot able to outperform humans in identifying a wide range of natural materials simply by sensing their textures. Named BioTac, the sensing technology could enable robots to ‘feel’ the objects they are interacting with, and it could eventually enable advancements in prostheses, personal robotic assistants and consumer product testing.
Researchers at the University of South Carolina (USC) Viterbi School of Engineering have designed a robot able to outperform humans in identifying a wide range of natural materials simply by sensing their textures. Named BioTac, the sensing technology could enable robots to ‘feel’ the objects they are interacting with, and it could eventually enable advancements in prostheses, personal robotic assistants and consumer product testing.
A theorem by 18th century mathematician Thomas Bayes describes how decisions might be made when humans try to identify an object by touch. Professor of Biomedical Engineering Gerald Loeb and recently graduated doctoral student Jeremy Fishel formed a new theorem named “Bayesian Exploration”, and it is used to define decisions about next movements during the exploration.
Built by Fishel, the specialized robot was trained on 117 common materials gathered from fabric, stationery and hardware stores. Making an average of five exploratory movements, the robot used the BioTac sensor to identify a randomly given material with success rate of 95 percent. Although it is built to mimic the human fingertip, it is interesting that cases when it didn’t guess the object by feeling its texture were pairs of similar textures that human subjects could not distinguish at all.
Aside possessing sensitivity which can outperform humans, BioTac sensor can also tell where and in which direction forces are applied to the fingertip, as well as the thermal properties of an object being touched. According to information found in the research paper Fishel and Loeb recently published, the sensor can be also used to identify the hardness of materials such as rubber. So, how does it actually sense objects and their properties?
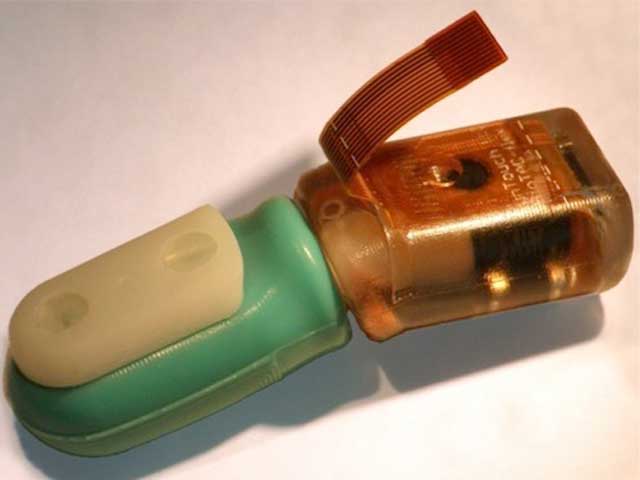
The sensor has a soft, flexible skin over a liquid filling. The skin surface has embedded groves which mimic fingerprints – a feature which greatly enhances the sensitivity to vibration. As the finger slides over a textured surface, the skin vibrates in characteristic ways. The liquid filling transfers these vibrations to the hydro-acoustic pressure sensor (hydrophone) which is placed in the inside rigid core of the finger.
Once forces are applied to the skin, the skin and fluid deform and the changes in fluid impedance as it deforms can be detected by an array of electrodes places just behind the layer which is filled with liquid filling. The heat of the object is detected by a thermistor placed in the tip of the BioTac sensor.
Fishel and Loeb pointed out that while their robot is very good at identifying which textures are similar to each other, it has no way to tell what textures people will prefer. Instead, they said this robot-touch technology could be used in human prostheses or to assist companies that employ experts to assess the feel of consumer products and even human skin.
Back in 2008, researchers from the USC Medical Device Development Facility founded a start-up named SynTouch LLC in order to develop and manufacture tactile sensors for mechatronic systems that mimic the human hand. SynTouch LLC is now selling its BioTac sensors to other researchers and manufacturers of industrial robots and prosthetic hands.
For more information, you can read the paper published in the journal Frontiers in Neurorobotics: “Bayesian exploration for intelligent identification of textures”.








Leave your response!