
CORBYS Mobile Robot-assisted Gait Rehabilitation System
 In Europe, strokes are the most common cause of physical disability among the elderly. Researchers in six European countries are currently developing a robotic system designed to help stroke patients re-train their bodies. Gathered in the CORBYS project, the researchers have a goal to create a system that can help stroke patients with training, motivation and walking.
In Europe, strokes are the most common cause of physical disability among the elderly. Researchers in six European countries are currently developing a robotic system designed to help stroke patients re-train their bodies. Gathered in the CORBYS project, the researchers have a goal to create a system that can help stroke patients with training, motivation and walking.
CORBYS project focuses on robotic systems that have symbiotic relationship with humans. A part of the project is development of Mobile Robot-assisted Gait Rehabilitation System which involves the use of physiological data such as heart rate, temperature and muscle activity measurements to provide feedback to the therapist and help control the robot involved with rehabilitation.
It is vital to get stroke patients up on their feet as soon as possible. They must have frequent training exercises, and practice walking in order to regain their independence. Current method of rehabilitation requires two therapists to assist the patient by lifting one leg after the other, and a robotic system could step in to replace the physically intensive work.
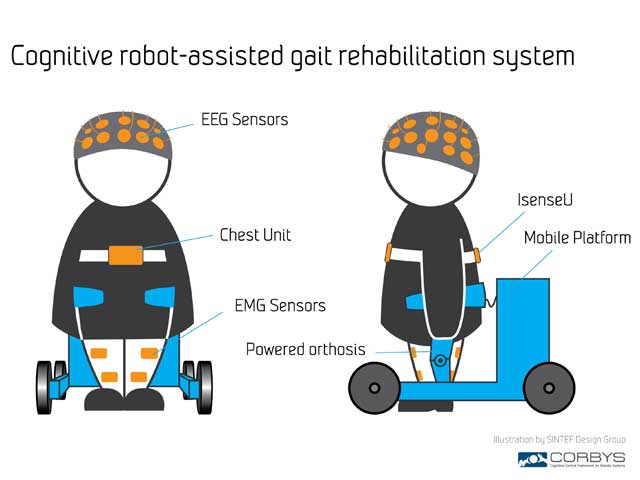
The concept is based on helping the patient by constructing a system consisting of powered orthosis to help patient in moving his/her legs and a mobile platform providing patient mobility.
“The walking robot has several settings, and the therapist selects the correct mode based on how far the patient has come in his or her rehabilitation”, said Anders Liverud, Senior Scientist at SINTEF – a research organization in Norway which participates in the project.
Rehabilitation process
The first step is to attach sensors to the patient’s body and let them walk on a treadmill in a Learning Mode. In this mode, a therapist manually corrects the walking pattern and a combination of sensors allows the system to learn optimal gait applicable to the individual patient.
The system optimizes gait continually, while comparing learned gait with the continuously measured data, by applying some corrective force towards the set goal gait pattern. Therapist evaluates parameters measured by the system and re-evaluates the gait on the treadmill, again optimizing the gait by changing the walking parameters of the system.
After some practice and adjusting in this mode, the patients go to the Corrective Mode where they try to use the system and walk straight over ground. This mode allows the patient to practice straight walking in a highly repetitive way, while permanently receiving corrective actuation, without the direct manual involvement of a physiotherapist.
The next step is Parameter Based Adaptation which relies on cognitive interaction between man and machine. The patient wears an electroencephalography (EEG) cap which measures brain activity. By combining these readings with input from other physiological and system sensors, the robotic system adapts to patient’s movement and provides the patient with freedom to decide where and how to walk.
Cognitive system selects a movement pattern, and an associated corrective pattern based on the detected parameters. It performs this task by evaluate both how well the selected model suited the patient’s intention and how well the selected pattern could be executed with the patient.
The final step is named Adaptive Walking and it is an extension of the Straight Walk Mode and Parameter Based Adaptation Mode which allows a completely parameter-based, intra-cycle adaptation. The cognitive system recognizes the patient’s intended movement trajectories within a gait cycle, and applies corrections through the robotic system. This mode allows the patient to freely walk around in the rehabilitation area, starting, stopping, and changing speed at will.
Who’s involved and when we could see one in action
The European researchers have now completed specification of the system and its components, and construction of the robot is underway. The University of Bremen is heading the project and developing the architecture to integrate all system modules, and German wheelchair, orthosis and robotics experts are constructing the mechanical components, while two UK universities are working with cognitive aspects. Spanish specialists are addressing brain activity measurements and the University of Brussels is looking into robot control. SINTEF is working with the sensors and the final functional integration of the system.

Aside being used in rehabilitation after stroke, the system could be used on patients with spinal cord injury or other illnesses and accidents often lead to walking disabilities. If not properly treated, gait disorders can lead to impaired physical and mental health, reduced physical activity, falls, fear of falling, loss of independence and the need for continuous medical care.
Robotized rehabilitation systems have a number of potential benefits over traditional manual rehabilitation. These benefits include an increase in the effectiveness of the rehabilitation process, reduced costs of rehabilitation and reduced need for trained medical personnel involved into rehabilitation of a single patient.
The CORBYS project started last year and it received funding for the following 4 years. The researchers claim that the robot will be tested on stroke patients at rehabilitation institutes in Slovenia and Germany within a year.








Leave your response!