
Cyberdyne HAL-5 – exoskeleton robot
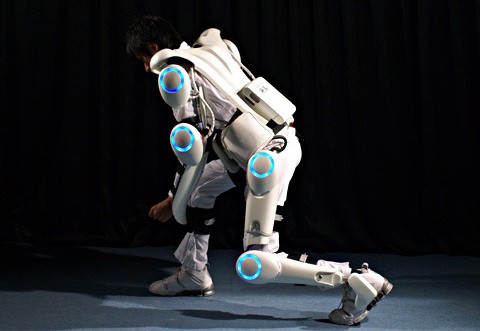 Robotic exoskeletons can be helpful in many ways as assisting the disabled and elderly in their daily tasks, or easing of any physically demanding task such as disaster rescue or construction. The HAL 5 exoskeleton helps the wearer to carry out a variety of everyday tasks, including standing up from a chair, walking, climbing up and down stairs, and lifting heavy objects. The developer of HAL, Yoshiyuki Sankai, a professor at the University of Tsukuba, started the development of HAL (short for Hybrid Assistive Limb) 15 years ago in order to aid people who have degenerated muscles or those paralyzed by brain or spinal injuries.
Robotic exoskeletons can be helpful in many ways as assisting the disabled and elderly in their daily tasks, or easing of any physically demanding task such as disaster rescue or construction. The HAL 5 exoskeleton helps the wearer to carry out a variety of everyday tasks, including standing up from a chair, walking, climbing up and down stairs, and lifting heavy objects. The developer of HAL, Yoshiyuki Sankai, a professor at the University of Tsukuba, started the development of HAL (short for Hybrid Assistive Limb) 15 years ago in order to aid people who have degenerated muscles or those paralyzed by brain or spinal injuries.
Sankai and his team developed two control systems that work together to command HAL-5’s limbs. The first control system, bio-cybernic system (a term coined by Sankai), monitors electric currents known as electromyogram, or EMG, signals on the wearer’s body. These signals flow along muscle fibers when a person intends to move. Coin-size sensors attached to the wearer’s skin near the shoulders, hips, knees, and elbows pick up the signals and feed them to the control computer, which then triggers the actuators to put the robotic arms and legs into action.

The job of the second control system is to let the wearer and suit move together more smoothly. It stores walking patterns–generated the first time the person tries out the suit–that are used to keep the suit’s limbs always in sync with those of the wearer. This system can be fine-tuned so the exoskeleton matches each wearer’s distinct gait, which is especially important if, say, the person has one leg less capable than the other. Senkai says it takes two months to calibrate the control systems so that they work optimally for each individual.
It also allows certain disabled people, whose EMG signals aren’t detectable, to use the suit. “If the user has trouble in the spinal cord or in the brain, we can’t use the bioelectric signals,” Sankai says. “In this case, the robotic autonomous control system activates itself automatically once the user starts moving.”
Cyberdyne HAL 5 comes in three sizes – small, medium and large and weighs in at 23kg. The whole suit is powered by a 100-volt battery attached to the operator’s waist. The suit can operate for almost five hours before it needs recharging, and exoskeletons developers are working on even longer operation time. Depending on the type of HAL you wear, it can multiply the original strength by a factor of 2 to 10. HAL-5’s structure consists of a frame made of nickel molybdenum and extra-super-duralumin, an aluminum alloy used in the wings of Japan’s famous World War II Zero fighter planes. Further strengthened by plastic casing, the metal frame is strapped to the body and supports the wearer externally.
If the brain/machine interfaces (BMI) become more efficient we could expect exoskeletons to become controlled even by the persons paralyzed from the neck down. Since it has robotic limbs, it could provide much better mobility and operation. Unfortunately, the HAL 5 is currently rentable only in Japan and it is available only in Japan and Europe (they have a branch office established in Amsterdam).








Seiji Uchida (48) who lost the ability to walk in a car accident 27 years ago, said he has long dreamed of visiting the Mont Saint-Michel by using the exoskeleton described in this article.
Uchida and a support team used an earlier version of the power-suit in an unsuccessful attempt to conquer the 4,164-meter (13,661-foot) Breithorn peak in Switzerland in 2006, when climbers wearing the exoskeleton carried Uchida.
Uchida said he wants to visit the rocky tidal island of Mont Saint-Michel where a steep and narrow trail lead to an abbey and former fortress in order to prove that it is possible for disabled people to visit the world’s historic sites without relying on facilities like elevators.
I want to use the same technology mapping the nerve signals f the electromyogram that Yoshiyuki Sankai used for a system to harness mental imagery to create solid energy blades…
Japan’s ministry for the economy, trade and industry said that they expect an international certification of quality assurance for their HAL exoskeleton to be approved later this year. The new international certification could introduce Hal exoskeleton to many new countries.
The metal-and-plastic exoskeleton has become the first nursing-care robot certified under the draft standard. Since 2010. Cyberdyne has leased some 330 suits to 150 hospitals, welfare and other facilities in Japan, at annual price of 78,000 yen ($1,950) per suit.
Dear sir wish you nice times,I am BASIM AL BAYATI from IRAQ- BAGHDAD my mother 65 years old got paralysis and have a difficulty in moving her left arm and left leg kindly wish your help in the possibility of getting one of your products which can help her in walking wishing your kind replay in giving me the specification and cost with best regards
BASIM AL BAYATI
BAGHDAD – IRAQ
author
Hi Basim,
I don’t think it is internationally available yet, and the rental procedure was limited to medical/welfare facilities, but you could contact Cyberdyne and ask when it could be available for individuals and in your country.
You can contact the developers of HAL-5 exoskeleton at this page.
These are some really nice mobility developments – I only wish my grandmother – bedbound for several years towards the end, could have lived long enough to enjoy them. : |
That said – YOU REALLY REALLY NEED TO CHANGE THOSE NAMES.
At first, I thought this article was an April Fools prank – Cyberdyne Systems building HALs? The genre-savy nuts in the US would open fire with the heaviest artillery they could carry under a trenchcoat if that headline appeared in the US.
FYI:
1) HAL was the name of the artificial intelligence that was the ‘star’ of the 1968 science fiction major cult classic “2001: A Space Odyssey” based on the books of Arthur C Clark. He was an AI driven insane and wound up trying to kill all humans.
2) Cyberdyne Systems is the fictional company that created the ‘learning computer’ named Skynet in the Terminator Franchise. Skynet then decided to Kill All Humans and started World War 3 with a nuclear strike for that express purpose, and followed up by building the Terminators to finish the slaughter.
So – both names belong to monstrously homicidal artificial intelligences.
Either name alone might be suspect, but both together?!
If you would like to know more interesting things such as this I would visit the game theorists channel on Youtube. (“halo Spartan armor in real life” I believe is what the video is called) it talks about different kinds of robotic exoskeletons being made and how they work and such.
I really like reading an article that will make men and women think.
You have a new regular reader!
I need it. But I am poor. I have no much money for buying this.
Hi
I am a tetraplegic and would like to know when suit will be available in Australia.