
Festo Bionic Handling Assistant inspired by elephant’s trunk
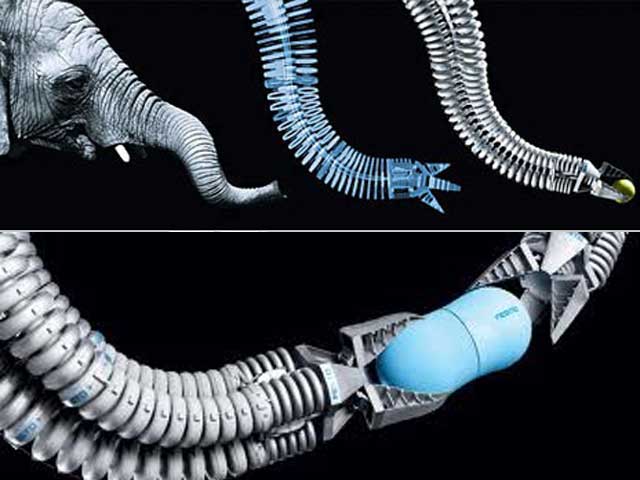 The ability of elephant’s trunk to be flexible, transmit large forces, and serve as a precise gripping tool, has inspired researchers to come up with the Bionic Handling Assistant. It was developed by Festo in cooperation with the Fraunhofer Institute for Manufacturing Engineering and Automation (IPA) and within the framework of the Bionic Learning Network – a research network comprising Festo and universities, institutes and development companies.
The ability of elephant’s trunk to be flexible, transmit large forces, and serve as a precise gripping tool, has inspired researchers to come up with the Bionic Handling Assistant. It was developed by Festo in cooperation with the Fraunhofer Institute for Manufacturing Engineering and Automation (IPA) and within the framework of the Bionic Learning Network – a research network comprising Festo and universities, institutes and development companies.
The project was based on the development of pneumatic lightweight structures by Professor Dieter Mankau of the Offenbach Art and Design University. This led to the creation of a structure for an assistance system. The Bionic Handling Assistant consists of three basic elements for spatial movement, as well as a hand axis and a gripper with adaptive fingers.
The basic elements each comprise three circularly arranged actuators tapering at an angle of three degrees. Each actuator is supplied with compressed air at the interfaces of the basic elements. Resetting is effected by the loop-like design of the actuators, which act like a spring when the compressed air is discharged. Bowden cable potentiometers on the outside of the actuators register their extension and control the system’s spatial movement.

The 3 actuators in the hand axis are arranged around a ball joint. Their activation displaces the gripper by an angle of up to 30 degrees. SMAT sensors from Festo register the travel and make for precise alignment. In total, the Bionic Handling Assistant offers 11 degrees of freedom. These open up a host of task-specific transport directions which, in contrast to conventional handling systems, are not restricted to linear axes.
The system’s “brain” is a multi-axis controller from Festo, the industrial motion control solution CMXR-C2. Pressure is regulated in the chambers of the Bionic Handling Assistant’s three-part arm by piezo valves, which enable more targeted use of compressed air, lower consumption and thus considerable cost savings. The adaptive gripper, named FinGripper, is based on the structure of a fish’s fin. The flexibility and compliance of the gripper are particularly impressive when it has to hold and move delicate objects or objects with varying contours. The FinGripper is also some 80% lighter than conventional heavy grippers made of metal, because it made in an additive manufacturing process in which the plastic shape is laser sintered.
Festo is currently developing three sizes for gripping different types of objects – from hazelnuts to grapefruits. International test customers are already using the FinGripper in their production lines.
Until now, conventional factory robots were carefully separated from humans – and vice versa. In the case of a collision with humans, the system immediately complies without changing its desired overall dynamics. Even in the case of an electronic or control error, the assistance system remains safe due to its inherent structural compliance. This means that aside the industrial environments, where the Bionic Handling Assistant can be used as a handling system to support assembly processes, the system can also be used wherever humans need non-hazardous support from machines, e.g. in medical technology, rehabilitation and as an aid for the handicapped, as well as in agriculture, private homes and educational institutes.








Leave your response!