
Harvard soft-bodied robots inspired by squid and starfish
 A research team from Harvard University developed an array of “soft” robots inspired by natural forms, such as squid and starfish, which are capable to perform very delicate operations or move where rigid robots might not. These abilities enable the robots to pick up a raw egg without breaking the shell, or aid in search and rescue missions where they can fit into tight spaces.
A research team from Harvard University developed an array of “soft” robots inspired by natural forms, such as squid and starfish, which are capable to perform very delicate operations or move where rigid robots might not. These abilities enable the robots to pick up a raw egg without breaking the shell, or aid in search and rescue missions where they can fit into tight spaces.
The process researchers used to construct the soft robots is relatively simple and surprisingly inexpensive. They used 3D printed molds to cast the robot’s two halves in silicone, and those halves are sandwiched around a thin layer of less-flexible plastic. Depending on how flexible the robot’s body needed to be, researchers used several different types of silicone.
“We can make the mold, cast the polymer, and put these things together in a couple hours”, said team leader George M. Whitesides, the Woodford L. and Ann A. Flowers University Professor. “Eventually, I think we’ll have designs that make these so cheap that you can just stack them up and throw them away after a single use.”
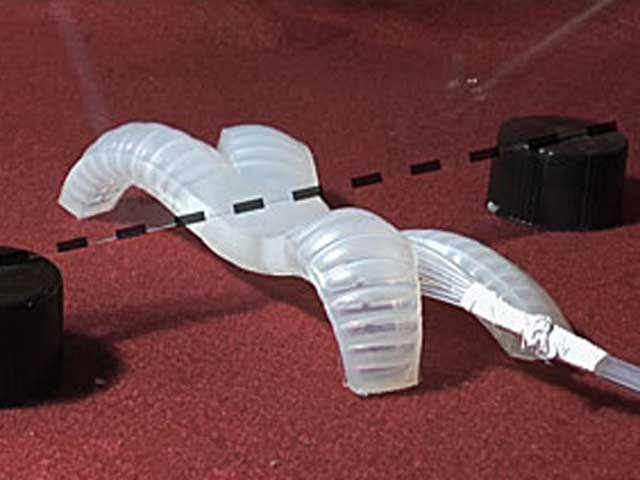
Unlike another soft-bodied robot named GoQBot, which mimics caterpillar movement, or ChemBot, which is basically a moving blob, the system developed by Harvard researchers enables the soft robots to grip objects once bladders inside the silicone sandwiched layers are inflated. Bladder inflation causes robot’s limbs to flex and grip items, but it also enables movement once it is used in a different setup.
In one of their designs, researchers created a four-legged platform that moves by using multiple air cylinders that open and close in sequence. The use of this method enabled them to create robots capable to walk or crawl through spaces as small as 1.9 cm (three quarters of an inch).
“Our concern right now is to see what kind of motion we can get, what are the materials that are needed to make these, and how easy is it to make them — the sort of basic, exploratory questions”, said Whitesides.
As with tires used for racing, softer materials tend to wear faster, and Harvard University researchers are planning to use tougher materials in order to make the robots more durable. They are also developing control systems that could allow the robots to work autonomously, and plan to experiment with different robot sizes.
Equipped with sensors, such as cameras and chemical detectors, soft-bodied robots could be used in search and rescue or disaster missions in order to pinpoint the locations of survivors, survey the damage from a disaster, or take chemical and radiation readings. Due to their soft grip potential, soft-bodied robots could be used to replace hard clamps in operating rooms, or act as an additional pair of hands for surgeons.
For more information, you can read the article published in the Proceedings of the National Academy of Sciences (PNAS) named: “Multigait soft robot” (PDF).








Leave your response!