
Meshworm – soft robot inspired by earthworms
 Inspired by earthworms, snails and sea cucumbers, which use the muscles along their bodies to creep along the ground by alternately squeezing and stretching them in a mechanism called peristalsis, researchers at MIT, Harvard University, and Seoul National University, have engineered Meshworm – a soft autonomous robot that crawls across surfaces by contracting segments of its body.
Inspired by earthworms, snails and sea cucumbers, which use the muscles along their bodies to creep along the ground by alternately squeezing and stretching them in a mechanism called peristalsis, researchers at MIT, Harvard University, and Seoul National University, have engineered Meshworm – a soft autonomous robot that crawls across surfaces by contracting segments of its body.
A significant challenge in soft robotics has been in designing soft actuators, or motors, to power such robots. One solution has been to use compressed air, carefully pumped through a robot to move it, but the integration of small air compressors into these robots still remains a challenge. As a solution, Sangbae Kim, the Esther and Harold E. Edgerton Assistant Professor of Mechanical Engineering at MIT, and his colleagues looked to the earthworm for design guidance. They noted that the creepy crawler is made up of two main muscle groups that work together to inch the worm along.
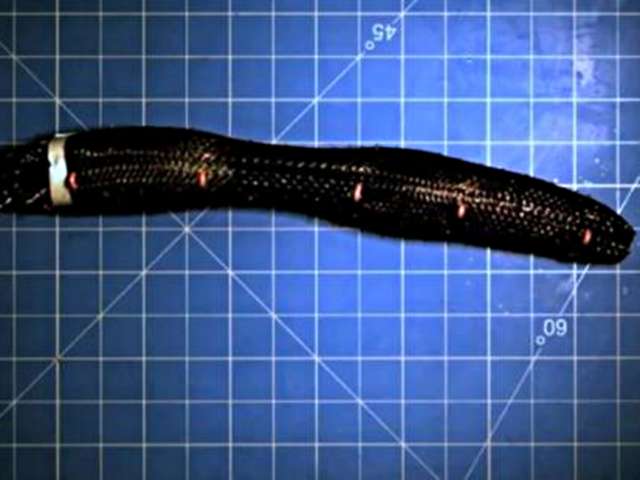
Robot’s body consists out of flexible, mesh-like tube which is wrapped with an “artificial muscle” created out of a shape-memory alloy wire that stretches and contracts with heat. The shape-memory alloy consists out of nickel and titanium, and it is wound around the tube in segments along its length, much like the segments of an earthworm. After a small current is applied to the segments of wire the mesh tube squeezes. By creating a desired sequence of the current application, the robot propels forward.
Depending on the ratio of nickel to titanium, the alloy changes phase with heat. Above a certain temperature, the alloy remains in austenite phase — a regularly aligned structure that springs back to its original shape, even after significant bending, much like flexible eyeglass frames. Below a certain temperature, the alloy shifts to a martensite phase — a more pliable structure that, like a paperclip, stays in the shape in which it’s bent.
As a segment reaches a certain temperature, the wire squeezes the body and propels the robot forward. The group also outfitted the robot with wires running along its length, similar to an earthworm’s longitudinal muscle fibers. When heated, an individual wire will contract, pulling the worm left or right.
The process is achieved with a small battery controlled by a circuit board within the body of the robot. Kim and his colleagues developed algorithms to carefully control the wire’s heating and cooling, directing the worm to move in various patterns.
The parts in Meshworms are all fibrous and flexible and the researchers performed stress tests where they subjected the robot to multiple blows with a hammer, even stepping on the robot to check its durability. Despite the violent impacts, the robot managed to operate without significant change in its performance.
Aside being used for exploration by squeezing through tight spaces and navigating rough terrain, soft robots like the Meshworm may have other useful applications in next-generation endoscopes, implants and prosthetic.
For more information, read the article published in the journal IEEE/ASME Transactions on Mechatronics: “Meshworm: A Peristaltic Soft Robot With Antagonistic Nickel Titanium Coil Actuators”.








Leave your response!