
Researchers develop a system for simultaneous control of multiple robots
 Max Planck Institute (MPI) researchers are using computer simulations and prototypes in order to enhance the simulations control of multiple robots. They are developing flying multi-robot systems, which receive instructions from a user and fulfill the commands in an autonomous manner. Navigated by a human operator, four or more of these Unmanned Aerial Vehicles (UAVs) perform local tasks while maintaining a programmed, spatial configuration.
Max Planck Institute (MPI) researchers are using computer simulations and prototypes in order to enhance the simulations control of multiple robots. They are developing flying multi-robot systems, which receive instructions from a user and fulfill the commands in an autonomous manner. Navigated by a human operator, four or more of these Unmanned Aerial Vehicles (UAVs) perform local tasks while maintaining a programmed, spatial configuration.
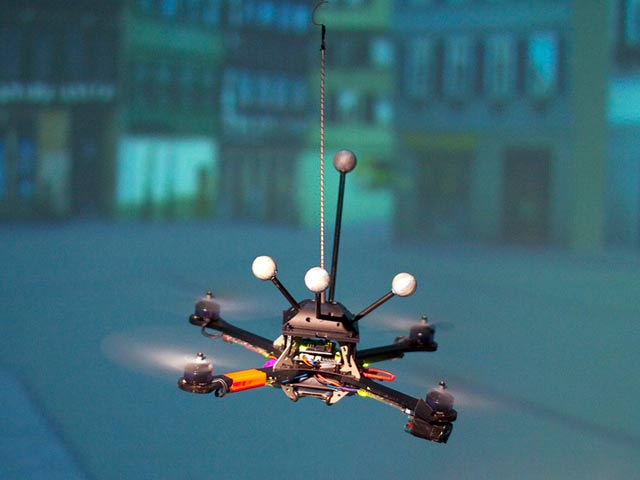
Led by Paolo Robuffo Giordano from the Human Robot Interaction Group in the Department Human Perception, Cognition and Action of Heinrich Bülthoff at the MPI for Biological Cybernetics, the team is working with small flying robots quadrocopters which are approximately 40 cm (15.7 inches) in diameter.
Depending on the equipment and programming, the robots can provide the operator with various sensory feedbacks such as visual, proprioceptive, tactile and auditory feedback. The robots are capable to autonomously keep track of each other by using cameras, and software allows them to regulate their position in relation to one another. If the UAVs are instructed to fly forward in a programmed formation, they are capable to autonomously avoid obstacles.
“It’s like actually flying against a wall”, said Robuffo Giordano. “We are investigating some fundamental aspects of these topics, which are necessary for any possible future applications. The development and programming of such robots is mainly an application of mathematical theories. That’s why we see ourselves as engineers.”
Some aspects of such multi-robot systems mimic the movement of swarms of birds or insects. This scenario becomes important when modeling big formations in computer simulations, in which the robots do not keep a defined distance to one another, but always need to keep in sight of another robot within the formation.
The results of this Human/Multi-robot research can be used for various applications. Small UAVs can be equipped with various sensors to collect different environmental data while flying in swarms. Scaled up UAVs could be used to fight fire or chase targets. On the other hand, with advance on nanotechnology and medicine, teams of medical nano-robots could be deployed inside the human body to examine or treat specific locations.
Share:

-
-
-
-
-
-








Interesting development in Human/Multi-robot interaction.
I really like the controller used to operate the robots, you should focus one of your articles on those!