
Robot Cheetah sets new land speed record for legged robots
 As a part of DARPA’s Maximum Mobility and Manipulation (M3) program, with goal to create and demonstrate significant scientific and engineering advances in robot mobility and manipulation capabilities, engineers from Boston Dynamics developed Cheetah – a robot named after the animal it got inspired from that managed to beat the previous land speed record for legged robots.
As a part of DARPA’s Maximum Mobility and Manipulation (M3) program, with goal to create and demonstrate significant scientific and engineering advances in robot mobility and manipulation capabilities, engineers from Boston Dynamics developed Cheetah – a robot named after the animal it got inspired from that managed to beat the previous land speed record for legged robots.
Unlike its natural inspiration which is capable to achieve land speed between 112 and 120 km/h (70 and 75 mph) in short bursts covering distances of up to 500 meters (1,600 feet), the Cheetah robot gallops at 28.97 kilometers per hour (18 miles per hour), which is a land speed record for legged robots. While still far from performance of its natural counterpart, it is an improvement compared to the previous record of 21.08 km/h (13.1 mph) which was set in 1989 at MIT.
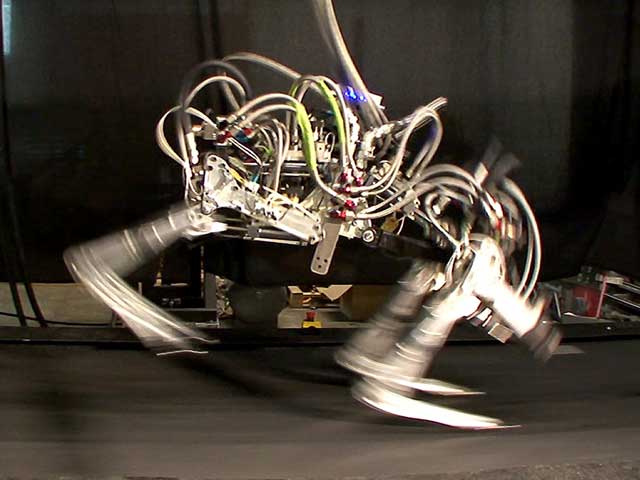
Cheetah robot has an articulated back that flexes back and forth on each step, thereby increasing its stride and running speed. The current version of the Cheetah robot runs on a high-speed treadmill in the laboratory where it is powered by an off-board hydraulic pump and uses a boom-like device to keep it running in the center of the treadmill. As you can notice in the video bellow, the robot’s movement resembles one of a galloping cheetah. That’s because the engineers from Boston Dynamics patterned the movement of these fast-running animals.
Although many perceive robots as clunky automatons from old science fiction movies, robots developed in recent years are getting more agile and fluid in motion. Funded by DARPA’s M3 program, whose goal is to create and demonstrate significant scientific and engineering advances in robotics, Cheetah development proves how biomimicry and advances in technology can improve robot performance.
Later this year, the engineers from Boston Dynamics plan to start testing a free-running Cheetah that will operate more naturally in the field. As far as the video shows, they have a lot of work to make it more stable while running at lower speeds. I also hope they’ll apply more bioinspiration to develop a tail-like appendage that would allow the robot to make sharp turns just like the cheetah uses its tail as a rudder-like means of steering.
Share:

-
-
-
-
-
-








The quadruped robot Cheetah recently has set a new robotic land speed record of 45.5 km/h (28.3 mph) for a 20-meter (65.6 ft) split.
The current version of the Cheetah robot is powered by an off-board hydraulic pump and uses a boom-like device to keep it running in the center of the treadmill. The increase in speed since results were achieved due to improved control algorithms and a more powerful pump.
http://www.youtube.com/watch?v=YqpO58x7vuE
DARPA intends to test a prototype on natural terrain next year, but for now Cheetah runs on a treadmill in a lab to allow researchers to monitor its progress, refine algorithms and maintain its moving parts.
A bionic robot cheetah? Sounds nice but what is it being made for? What are they going to have this robot do, run free? I understand it cant eat man, but it surely can harm us in a way. The only thing benefically about this robot is its speed.