
Scalybot 2 movement inspired by snake rectilinear locomotion
 All-terrain robots for search-and-rescue missions must be flexible enough to move over uneven surfaces, and be able to squeeze themselves into tight spaces. Many engineers and researchers have been inspired by nature’s way to solve this problem and the develop snake like robots that could be up to the challenge. Georgia Tech researchers have designed a new machine by studying rectilinear locomotion of snakes.
All-terrain robots for search-and-rescue missions must be flexible enough to move over uneven surfaces, and be able to squeeze themselves into tight spaces. Many engineers and researchers have been inspired by nature’s way to solve this problem and the develop snake like robots that could be up to the challenge. Georgia Tech researchers have designed a new machine by studying rectilinear locomotion of snakes.
“By using their scales to control frictional properties, snakes are able to move large distances while exerting very little energy”, said Hamid Marvi, a Mechanical Engineering Ph.D. candidate at Georgia Tech.
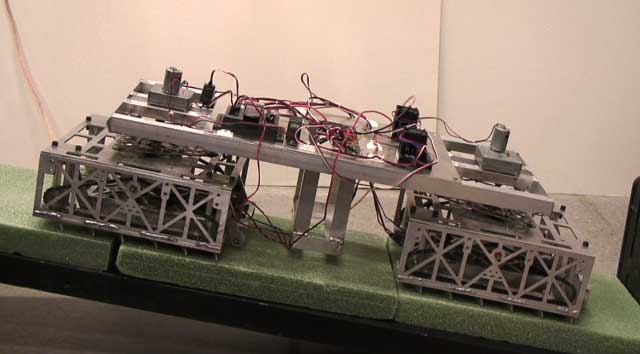
While studying and videotaping the movements of 20 different species at Zoo Atlanta, Marvi developed Scalybot 2 – a robot that replicates rectilinear locomotion of snakes. Unlike all other ways snakes use to move, such as bending their bodies, rectilinear locomotion relies upon two opposing muscles located on each rib. By moving the skin in posterior propagation, the snakes using this method manage to achieve continuous motion and flex their bodies only when turning.
“During rectilinear locomotion, a snake doesn’t have to bend its body laterally to move”, said Marvi. “Snakes lift their ventral scales and pull themselves forward by sending a muscular traveling wave from head to tail. Rectilinear locomotion is very efficient and is especially useful for crawling within crevices, an invaluable benefit for search-and-rescue robots.”
Marvi’s advisor David Hu, an assistant professor in the Schools of Mechanical Engineering and Biology, and his lab previously developed Scalybot 1 – a two-link climbing robot that replicates concertina locomotion. The push-and-pull, accordion-style movement features alternating scale activity.
Scalybot 2 can automatically change the angle of its scales when it encounters different terrains and slopes. This adjustment allows the robot to either fight or generate friction. The two-link robot is controlled by a remote-controlled joystick and can move forward and backward using four motors.
This method of locomotion is extremely slow, but it’s nearly noiseless and very hard to detect, making it the mode of choice for many species when stalking. As in nature, this way of robotic motion seems pretty slow, and there are many aspects that need improvement to make it faster, more efficient and versatile. However, the Georgia Tech research does show potential for use in confined spaces while consuming far less energy compared to other available solutions.








Leave your response!