
TBCP-II robot uses gecko tape coated belts to climb smooth surfaces
 Drawing inspiration from the gecko, researchers from the Simon Fraser University (SFU) have been able to create adhesives that carefully mimic the toe pads of the lizard that give it the amazing ability to climb smooth vertical surfaces. They used those adhesives on belts used by Timeless Belt Climbing Platform (TBCP-II) – a tank-like robot whose simple design makes it suitable for use in various applications.
Drawing inspiration from the gecko, researchers from the Simon Fraser University (SFU) have been able to create adhesives that carefully mimic the toe pads of the lizard that give it the amazing ability to climb smooth vertical surfaces. They used those adhesives on belts used by Timeless Belt Climbing Platform (TBCP-II) – a tank-like robot whose simple design makes it suitable for use in various applications.
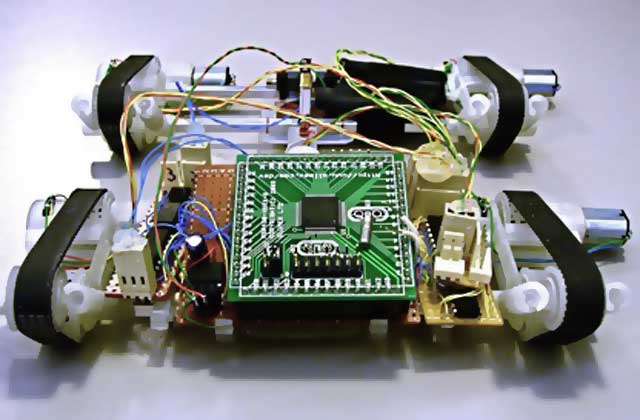
So far, there have been many attempts to develop a robot capable to climb vertically. Some of the proposed solutions include magnets, suction cups, spines and claws, but they lack in simplicity of their realization or aren’t capable to operate on smooth surfaces such as glass or plastic. Developed by researchers from SFU’s MENRVA Group, TBCP-II weights only 240g (0.5 pounds), and it is capable to transfer from a flat surface to a wall over both inside and outside corners at speeds of up to 3.4cm/s (1.34 inches per second).
Tank-like robots, driven by belts rather than a set of legs, are advantageous in that they have a simplified mechanical design and control architecture, have an increased mobility and can be easily expanded, just like a train, if you need to increase the load the robot is carrying. TBCP-II is also fitted with a multitude of sensors that are able to detect the surroundings of the robot and change its course of action accordingly.
“With an adequate power supply, our robot is capable of functioning fairly independently when it encounters larger-scale objects such as boxes or walls. However, we are still developing a control strategy to ensure the robot is capable of fully autonomous functionality”, said Jeff Krahn, Research Assistant at SFU and lead author of the research paper.
The dry, but sticky toe pads, also known as dry fibrillar adhesives, have been used by various researchers in the last decade, and we already wrote several articles about gecko biomimicry. In order to mimic these pads, the researchers used polydimethylsiloxane (PDMS) manufactured to contain very small mushroom cap shapes that were 17 micrometres wide and 10 micrometres high.
“While van der Waals forces are considered to be relatively weak, the thin, flexible overhang provided by the mushroom cap ensures that the area of contact between the robot and the surface is maximized”, said Krahn. “The adhesive pads on geckos follow this same principle by utilizing a large number of fibres, each with a very small tip. The more fibres a gecko has in contact, the greater attachment force it has on a surface,”
Robot’s ability to scale smooth walls as well as its simplicity could be useful in various applications such as inspection of pipes, buildings, aircrafts and nuclear power plants, or use in search and rescue operations.
For more information, you can read the article published in the IOP Publishing’s journal Smart Materials and Structures named: “A tailless timing belt climbing platform utilizing dry adhesives with mushroom caps“.








Leave your response!