
eyeBug – a simple, modular and cheap open-source robot
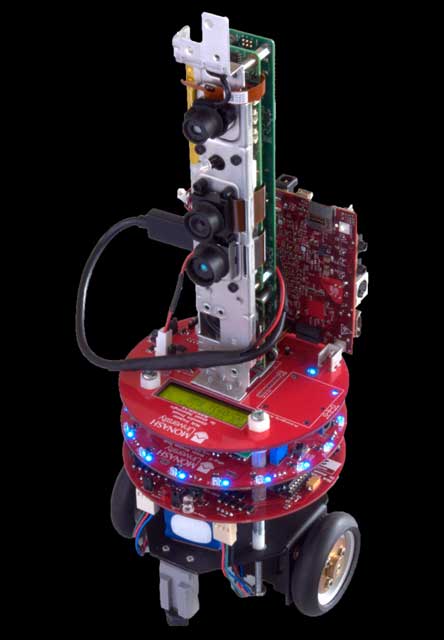 Currently available robots are mostly used for industrial tasks such as manufacturing, mining and inspection, as well as being an important research tool. As a part of his final year project, Monash University engineering student, Nick D’Ademo has designed an experimental robot called eyeBug. Aside being cheap to build, its flexible design and modularity encouraged other students to develop new features for the robot.
Currently available robots are mostly used for industrial tasks such as manufacturing, mining and inspection, as well as being an important research tool. As a part of his final year project, Monash University engineering student, Nick D’Ademo has designed an experimental robot called eyeBug. Aside being cheap to build, its flexible design and modularity encouraged other students to develop new features for the robot.
“Design is an integral part of our engineering students’ curriculum where they are given the challenge of taking an idea and develop it into a fully functioning system. It is extremely rewarding for us to see the students applying the principles we teach so successfully”, said Dr Ahmet Sekercioglu from the Monash University Department of Electrical and Computer Systems Engineering, who supervised the project.
The resulting robot has attracted a lot of attention and it is already being used for a wide range of research projects. By studying the way robots form networks to communicate with each other, the project enables insight into knowledge needed for development of the next generation of smart mobile phones.
Nick D’Ademo and Dr Sekercioglu plan to develop eyeBug as open-source and release all the programs and system design documents to the internet community, thus establishing university-to-university collaboration links in various projects.
Dr Sekercioglu’s postgraduate students have already started developing technologies to extend the robot’s capabilities by creating distributed smart camera networks. They envision swarms of eyeBug robots equipped with artificial intelligence algorithms which would enable them to construct digital 3D models of their environment by communicating and sharing what every individual eyeBug robot records.
“Robots are already vital to the way we live today. They’ve changed the way we approach activities, and they are becoming ‘networked’. For example, a team of eyeBugs could potentially be used to map out a scene inside a building after an earthquake, or a nuclear reactor after an accident”, said Dr Sekercioglu.
Other researchers are also keen to develop new features for the eyeBug robot. Professor Tom Drummond who leads the Augmented Reality research group at Monash University plans to employ vision processing and distributed computational capabilities of the eueBug robot in order to advance the development of current augmented reality technologies.








Looks a bit too simple. At least it will provide students with some platform to test their ideas on before they move to something more complex.