
Humanoid Robot Justin developed for maintenance of satellites
 After writing about several potential modular robotic space explorers (such as SuperBot or Festo Molecubes) and writing about NASA’s dexterous space robot Robonaut 2, in this article we’re going to present another dexterous humanoid robot named Justin. It is developed at the Institute of Robotics and Mechatronics, part of the German Aerospace Center (DLR), in order to fix satellites in the future.
After writing about several potential modular robotic space explorers (such as SuperBot or Festo Molecubes) and writing about NASA’s dexterous space robot Robonaut 2, in this article we’re going to present another dexterous humanoid robot named Justin. It is developed at the Institute of Robotics and Mechatronics, part of the German Aerospace Center (DLR), in order to fix satellites in the future.
The system design uses preliminary works of the institute, namely the DLR light weight robot (LWR) and the DLR hand. The torso (based on LWR technology) and the newly developed mobile platform enlarge the workspace of the arms and hands in a human like manner, by using coordinated arm and leg movements. The modular design of the LWR and the DLR hands enables the configuration of a human-like left and right arm.
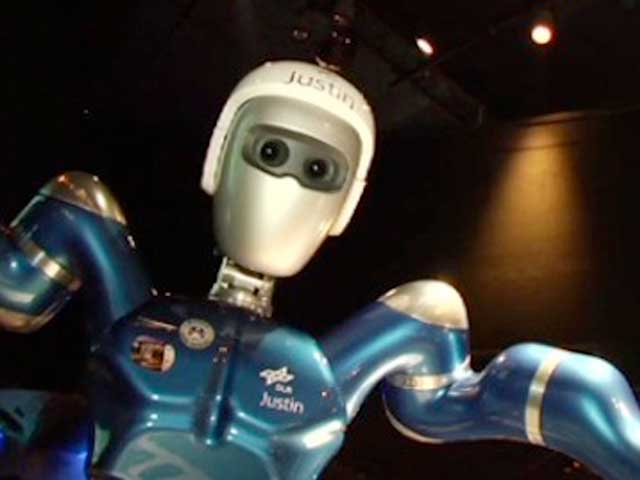
The robot has different configurations, including one with wheels. The space version has a head, torso, and arms, but no wheels or legs, because it will be mounted on a spacecraft or satellite. The upper body holds a total of 43 controllable degrees of freedom (2 x 7 in arms, 5 in torso and 2 x 12 in hands). The goal is to use Justin to repair or refuel satellites that need to be serviced. The long term goal of its developers is to make it work autonomously.
The developers chose to use aRD-concept (“agile Robot Development”) software architecture in order to avoid the use of usual predominately monolithic control structure. Instead, they broke it into individual modules which can be run distributed on multiple processors. The implementation consists of a small collection of libraries and configuration tools. It allows the integration of a variety of standard tools such as Matlab / Simulink for controller design.
For now, the researchers are relying on another approach named robotic telepresence. A human operator controls the robot by using a head-mounted display and an arm exoskeleton. The arms and fingers have force and torque sensors, which provide feedback to the operator via exoskeleton. Justin’s head has two cameras and, used for stereoscopic vision, which enable the sense of depth to the operator. It is also equipped with laser range sensors.
Share:

-
-
-
-
-
-








Leave your response!