
Rescue league in RoboCup 2009
 In one of our previous articles we wrote about football robots in RoboCup 2009. In this article we’re going to write about a different competition in which resque robots competed. Robots can go in places where humans can’t – for instance in rescue missions following natural disasters. The aim of RoboCup 2009 Rescue is to promote research and development in the field of rescue robotics and present a practical result of robotics research. There are two RoboCup leagues give an insight into digitally supported rescue possibilities: Rescue Simulation und Real Rescue.
In one of our previous articles we wrote about football robots in RoboCup 2009. In this article we’re going to write about a different competition in which resque robots competed. Robots can go in places where humans can’t – for instance in rescue missions following natural disasters. The aim of RoboCup 2009 Rescue is to promote research and development in the field of rescue robotics and present a practical result of robotics research. There are two RoboCup leagues give an insight into digitally supported rescue possibilities: Rescue Simulation und Real Rescue.
The Simulation League is principally an international testing ground for simulating robots which carry out search and rescue operations in urban environments. Intelligent “agents” have to solve various search-and-rescue tasks in virtual catastrophe worlds. The research aim is to give valuable decision support in emergencies by integrating disaster information and prediction detailed planning and thinking in human rescue teams. The idea behind the Real Rescue League is to deploy semi-autonomous search and rescue robots in a life-threatening environment after a natural disaster. Heat, dust and collapsed buildings make a rescue mission using humans or animals too dangerous. The rescue robots are meant to gather information which serves the emergency task force as a basis for making decisions. The RoboCup event in this league can be described as follows: A team of several autonomous robots moves around in a specially built test environment which is divided into areas with differing grades of difficulty. They “search” out victim dummies, put together a map of the environment, and send information to their human operators.

In the first scenario, amidst smoke and fire, a flight robot had to find a victim on the rooftop of the Stadthalle and send information via video signals to rescue personnel. In the real world, blazing flames on the eighth floor of a skyscraper would make reconnaissance and the search for injured people life threatening for fire and rescue services. A remote controlled flight robot however can help by gaining an overview of the situation and sending information to the rescue services on the ground.
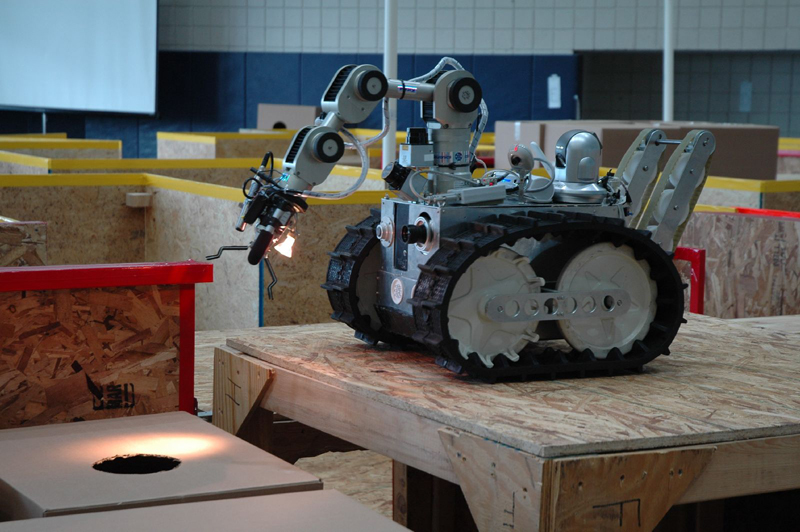
In the second scenario, rescue robots had to contend with a crashed automobile loaded with hazardous materials. “Telemax”, a metal robot operated by remote control was used to retrieve the sensitive substances and bring them out of the danger zone.
Disaster rescue is one of the most serious social issues which involve very large numbers of heterogeneous agents in a hostile environment. The RoboCup Rescue project works to further research and development through multi-agent team coordination, physical robotic agents for search and rescue, information infrastructures, personal digital assistants, a standard simulator and decision support systems, evaluation benchmarks for rescue strategies and robotic systems that are all integrated into a comprehensive system in the future.
The rescue robotics program also featured practical training courses for first responders, providing an environment for search and rescue services from around the world to practice operating flight robots, go on a reconnaissance mission in a specially designed rescue area with rescue robots or practice various manipulation tasks and recover hazardous materials or retrieve injured persons using remote controlled robots, and a workshop for rescuers and robotics researchers to exchange experiences.
Share:

-
-
-
-
-
-








Leave your response!