
Skiing robots might prove more useful than you think
 In our previous articles we’ve written about robot cooks and dozen of robots which mimic various animals in order to benefit the features some animal offers. Researcher Bojan Nemec, from the Jožef Stefan Institute in Slovenia, decided to construct a skiing robot. He isn’t the first who thought of the idea, but his robot differs from the previous ones built by his colleagues from around the world. Another team of researchers, from Kanazawa University in Japan, has taken the first steps toward developing a robot experimental system in order to investigate the effects of joint motions on ski turns, and ultimately serve as a model to help skiers improve their own movements.
In our previous articles we’ve written about robot cooks and dozen of robots which mimic various animals in order to benefit the features some animal offers. Researcher Bojan Nemec, from the Jožef Stefan Institute in Slovenia, decided to construct a skiing robot. He isn’t the first who thought of the idea, but his robot differs from the previous ones built by his colleagues from around the world. Another team of researchers, from Kanazawa University in Japan, has taken the first steps toward developing a robot experimental system in order to investigate the effects of joint motions on ski turns, and ultimately serve as a model to help skiers improve their own movements.
Generally, measuring the movements of skiers, especially the relationship between the joint angles and ski turn quality, has been very difficult. For instance, attempts at direct measurement face technical challenges and achieve only limited precision, and computer simulations (though more precise) must make many assumptions and are difficult to validate. On the other hand, the ski robot method has the advantage of providing precise measurements with controllable, consistent movements, as long as the robot can be designed to accurately simulate a human athlete.
“There have been several attempts at researching ski turns using a skiing robot,” said Takeshi Yoneyama of Kanazawa University. “But there have been few considerations on the conditions required to simulate human skiing with a robot. Our attempt is to clarify the considerations for developing a modeling system using a ski robot. We also wanted to express that we are approaching this subject to obtain some useful knowledge for human skiers.”
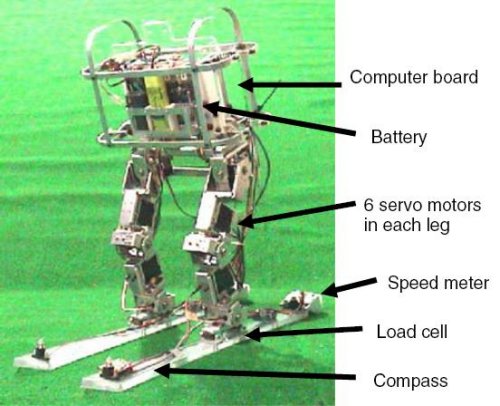
Although the researchers tried to model a real skier as closely as possible, they faced several challenges. Their robot consisted of two legs attached to skis, with a large “waist” that contained the computer and battery. They had to modify certain values, such as the ratio of the robot’s center of mass to its ski separation distance; a version of the robot with the correct human ratio was very prone to falling over. Despite (or because of) the differences in size, mass, and mass distribution, the robot was capable of performing several successful test runs on an 11-meter-long test slope covered in artificial grass with an inclination of 20°.
The robot had six servomotors in each leg to allow for six degrees of freedom, while its onboard computer controlled the sequences of the joint angles. The robot also had force sensors between each “foot” and ski, and an odometer at the rear of each ski, while a video camera at the base of the slope recorded the robot’s trajectory. The researchers could program various motions into the robot to investigate the relations among joint angles and turn trajectory, for example, they programmed a motion plan based on the skiing style of the world cup racer Gaku Hirasawa, who turns his waist to face inside the turn arc. Copying this technique made the robot’s turn faster and more stable.
Overall, the researchers found that the robot could enable them to separate and investigate the effects of each joint motion on skiing performance. Still, the robot was limited as a model due to its differences from a human being, and the researchers hope to improve the robot’s human-likeness in the future.
On the other hand, the Slovenian researcher Nemec his mechanical skier has been practicing, and it now can race downhill and even make turns to pass between gates, slalom-style. His goal is to design a robot skier capable of autonomous skiing using the carving technique (according to Nemec, a robot can’t ski using regular technique, however with carving, the skis practically ski themselves).
It’s bigger and heavier than earlier Japanese models, Nemec explained. Ideally, a skiing robot would be able to use off-the-shelf skis, rather than custom-made miniature ones. About the size of an eight-year-old child, the skiing robot looks a lot like a laptop on legs. The laptop control center plans the robot’s trajectory, using a camera to measure its distance from the race gates. Gyros and force sensors help the robot stay stabilized on the slopes.
The robot carries a GPS unit, but it’s used to help measure speed, not for trajectory planning, because he is trying to build a robot that works more like a human and relies on visual sensors. In the next video you can see how robot goes down the slope and recognizes the gates (more or less successfully).
When Nemec was asked what would the robot need in order to be able to compete with humans in a downhill skiing race in near future, he answered: “I think people are expecting too much from this robot. But it would need additional degrees of freedom, and should be more robust — once our robot escaped from our control, and it broke a lot of parts. So, more robust.”
The answer to the question why should we develop similar robots is simple; besides helping professional athletes to find a better technique, they could test ski equipment, or be used to model skiing for entertainment in the future. On the other hand, they could be used as search and rescue robots during avalanches, as well as inspectors of ski slopes, or even be the first step toward robotic ski instructors.
Share:

-
-
-
-
-
-








Leave your response!