
World’s First Flying Microrobot
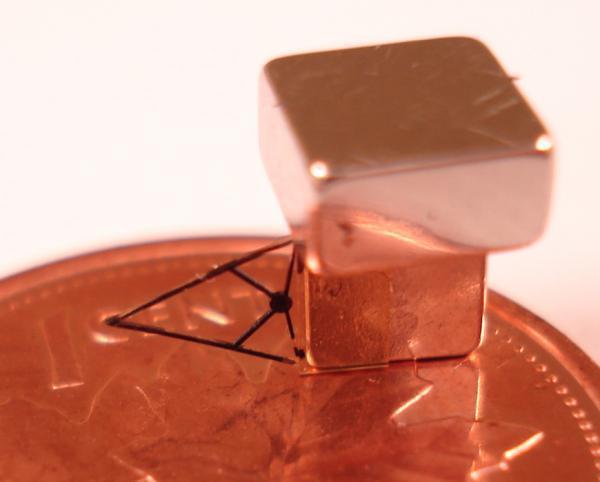 A flying micro-robot has been developed by researchers at the University of Waterloo in Ontario. A research team, led by Professor Mir Behrad Khamesee, manipulates magnetic fields to levitate and move around three axes a robot weighing about three-hundredths of an ounce.
A flying micro-robot has been developed by researchers at the University of Waterloo in Ontario. A research team, led by Professor Mir Behrad Khamesee, manipulates magnetic fields to levitate and move around three axes a robot weighing about three-hundredths of an ounce.
The micro-robot discovery provides researchers with more control over the micro scale environment, allowing them to move and place tiny objects with far greater precision. The micro scale deals with tiny objects, at levels that are too small to be manipulated by humans.
It operates on an array of electromagnets which are used to create a three-dimensional parabolic magnetic field. The robot is also magnetized and sits on top of the parabola, supported by the interaction between its own magnetic field and that created by the electromagnets. Altering the flow of current in the electromagnet distorts the field and moves the robot.
Since there is no wiring, and the robot freely floats in air, it can operate in an enclosed chamber while the whole setup is outside. It can work in hazardous environments, toxic chambers, and it can be used to conduct bio-hazardous experiments. Also, since there is no mechanical linkage, it has a dust-free operation, suitable for clean room applications.
The micro-robot has pincers which can be opened by heating them with a laser. When the laser is turned off the pincers cool and close. Lasers are also used to detect the position of the robot. There are three sets of laser sensors for detecting the position of the micro-robot in three-dimensional space. The robot is an obstacle for the laser beam in space, and its position can be read.
The robot is monitored by the laser sensors and a camera, which create a feedback loop to a computer. When the robot grasps an object, the magnetic field is automatically adjusted so the robot can maintain its position while supporting the weight of the object.
The research team, which includes Khamesee and graduate students Caglar Elbuken and Mustafa Yavuz, submitted the paper last fall to the Institute of Electrical and Electronics Engineers and the American Society of Mechanical Engineers for possible publication.








Leave your response!