
TakkTile sensor – inexpensive tactile sensing with MEMS barometers
 Researchers at the Harvard School of Engineering and Applied Sciences (SEAS) have developed an inexpensive tactile sensor for robotic hands that is sensitive enough to turn a brute machine into a dexterous manipulator. Named TakkTile, the sensor is intended to put what is currently being developed in laboratories within the grasp of commercial inventors, teachers, and robotics enthusiasts.
Researchers at the Harvard School of Engineering and Applied Sciences (SEAS) have developed an inexpensive tactile sensor for robotic hands that is sensitive enough to turn a brute machine into a dexterous manipulator. Named TakkTile, the sensor is intended to put what is currently being developed in laboratories within the grasp of commercial inventors, teachers, and robotics enthusiasts.
“Despite decades of research, tactile sensing hasn’t moved into general use because it’s been expensive and fragile”, said Leif Jentoft, a graduate student at SEAS who co-created the sensor. “It normally costs about $16,000, give or take, to put tactile sensing on a research robot hand. The traditional technology also uses very specialized construction techniques, which can slow down your work. Now, Takktile changes that because it’s based on much simpler and cheaper fabrication methods.”
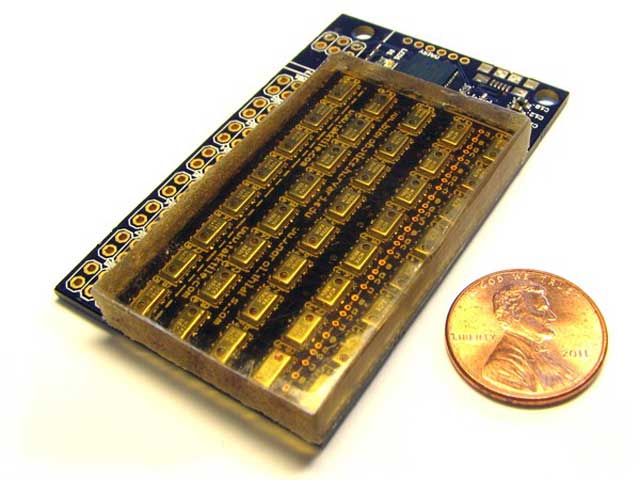
TakkTile relies on MEMS barometers that have already found widespread application in consumer mobile devices such as GPS locators, where they are used for altitude calibration. The chips consist of a MEMS diaphragm with a Wheatstone bridge, an instrumentation amplifier, a temperature sensor, multiplexer, analog-to-digital converter, and I2C bus — all for around $1 USD. A layer of vacuum-sealed rubber is added to this tiny barometer, enabling it to be sensitive enough to detect a very slight touch. This also greatly improves consistency of readings at 1-gram (0.035-ounce) sensitivity.

The vacuum-sealed rubber also protects the sensors, enabling them to withstand pressures from as much as 11.34 kg (25 pounds) of direct pressure. According to Jentoft and Yaroslav Tenzer, a postdoctoral fellow at Harvard Biorobotics Laboratory and co-creator of the sensor, the chips can even survive a strike from a hammer or a baseball bat.
The sensors can be built using relatively simple equipment – the patented process relies on standard methods used in printed circuit board fabrication, along with access to a vacuum chamber. The sensor can be connected mentioned I2C bus or USB, making it practical in various situations.
Once added to a mechanical hand, the sensor enables the robots to know what they are touching. An equipped robot could pick up something fragile as an egg or a balloon without too much force. Beyond robotics, Jentoft and Tenzer suggest that the TakkTile sensor could be used in a range of electronic devices. A toy manufacturer could make a stuffed toy-animal that responds to petting, while a medical device designer could create a laparoscopic grasper that provides enhanced feedback during surgery.
Harvard plans to license the technology to companies interested in offering prefabricated sensors or in integrating TakkTile sensing into products such as robots, consumer devices, and industrial products. You can also find some open source data at this page.
There are various TakkTile products, but I would like to mention TakkTile Starter Kit in order to make it comparable to other available tactile sensing technologies. The Starter Kit costs $299 at the moment and it includes two TakkStrips (5 sensors end-to-end spaced at 8mm spacing) cast in rubber. The communication with the TakkStrips is provided through dedicated Arduino device. The device uses a virtual serial port which is supported widely on Windows, Mac, and Linux. The sensor readings can be displayed in a serial terminal, or processed through a Python API, or even Matlab, making it ideal for enthusiasts or small research groups.
For more information, you can read the following paper: “Inexpensive and Easily Customized Tactile Array Sensors using MEMS Barometers Chips” [1.61MB PDF].








Leave your response!