
Tangible holography – Airborne Ultrasound Tactile Display
 Mid-air displays which project floating images in free space have been seen in SF movies for several decades. We wrote about technologies that contribute to the development of holograms (regarding data storage and potential interfaces that could be developed for usage with holographic technology) in our previous articles. Recently, they are attracting a lot of attention as promising technologies in the field of digital signage and home TV, and many types of holographic displays are proposed and developed. You can see a virtual object as if it is really hovering in front of you. But that amazing experience is broken down the moment you reach for it, because you feel no sensation on your hand.
Mid-air displays which project floating images in free space have been seen in SF movies for several decades. We wrote about technologies that contribute to the development of holograms (regarding data storage and potential interfaces that could be developed for usage with holographic technology) in our previous articles. Recently, they are attracting a lot of attention as promising technologies in the field of digital signage and home TV, and many types of holographic displays are proposed and developed. You can see a virtual object as if it is really hovering in front of you. But that amazing experience is broken down the moment you reach for it, because you feel no sensation on your hand.
The objective of a team from Tokyo University, Japan, is adding tactile feedback to the hovering image in 3D free space. One of the biggest issues is how to provide tactile sensation. Although tactile sensation needs contact with objects by nature, the existence of a stimulator in the work space depresses the appearance of holographic images. Therefore some kind of remote-controllable tactile sensation is needed. That is achieved by development of a original tactile display.

They used a holographic display Holo which provides floating images from an LCD by utilizing a concave mirror. The projected images float at 30cm away from the display surface. A user can get near to the image and try to touch it. Of course, his fingers pass through it with no tactile sensation.
Airborne Ultrasound Tactile Display is a tactile display which provides tactile sensation onto the user’s hand. It utilizes the nonlinear phenomenon of ultrasound; acoustic radiation pressure. When an object interrupts the propagation of ultrasound, a pressure field is exerted on the surface of the object. The acoustic radiation pressure acts in the same direction of the ultrasound propagation. That is, roughly saying, the ultrasound “pushing” the object. When the tactile display radiates the ultrasound, the users can feel tactile sensation on their bare hands in free space with no direct contact.
The current version of prototype consists of 324 ultrasound transducers. The resonant frequency is 40 kHz. The phase delays and amplitudes of all the transducers are controlled individually to generate one focal point and move it three-dimensionally. The total output force within the focal region is 1.6gf. The diameter of the focal point is 20mm. The prototype can produce sufficient vibrations up to 1 kHz.
While camera-based and marker-less hand tracking systems are demonstrated these days, they used Wiimote (Nintendo) which has an infrared (IR) camera. A retro-reflective marker is attached on the tip of user’s middle finger. IR LEDs illuminate the marker and two Wiimotes sense the 3D position of the finger. Due to this hand-tracking system, the users can handle the floating virtual image with their hands.
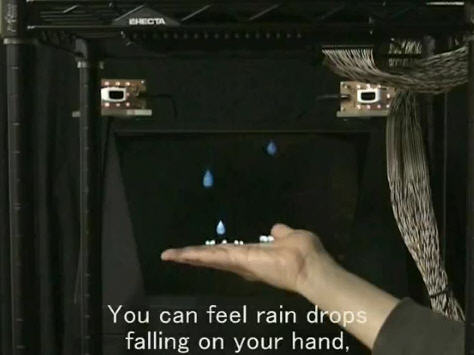
The developed system can render various virtual objects because not only visual but also tactile sensation is refreshable based on digital data. It is useful for video games, 3D CADs, and so on. In the video there are two demonstrations: user feels tactile sensation created by the ultrasound when the rain drop hits the user’s palm, and in another demonstration, he sees and feels a small virtual creature running on his palm.








All these things are nice but too much resources are spent for creating illusions, aren’t they? For example it would be better to implant an interconnection to optical nerves instead of manufacturing a 42″ LCD display. I searched a lot in google but found nothing, didn’t anyone do smth like that yet?
author
Actually, this article isn’t fully related to that subject since it’s related to the sense of touch rather than sight. However, the subject is interesting and I feel the urge to reply.
Many displays are used in order to share the media more efficiently and widely spread than implants could in near future.
In my humble opinion, implants (or some fancy glasses) will find use in entertainment industry as soon as LIDARs or some similar technology finds its use alongside the common recording. That way the real images along with 3D perspective could be transmitted onto optical nerves.
Combined with body tracking technologies, greater media storage, better image quality and adaptable materials we can only wait for the new gadgets to be served. And those are only the near future technologies. On the other hand, there are many social issues that need to be solved, but I won’t go into that subject here.