
WalkMate System aids to people with Parkinson’s disease
 Everyone has probably experienced the phenomenon where their footsteps are unconsciously synchronized with their friends during a stroll. Understanding the mechanisms behind this synchronization could help people with a disturbed gait. Researchers from the Tokyo Institute of Technology have decided to demystify the process and as a result developed a new walking support device named WalkMate.
Everyone has probably experienced the phenomenon where their footsteps are unconsciously synchronized with their friends during a stroll. Understanding the mechanisms behind this synchronization could help people with a disturbed gait. Researchers from the Tokyo Institute of Technology have decided to demystify the process and as a result developed a new walking support device named WalkMate.
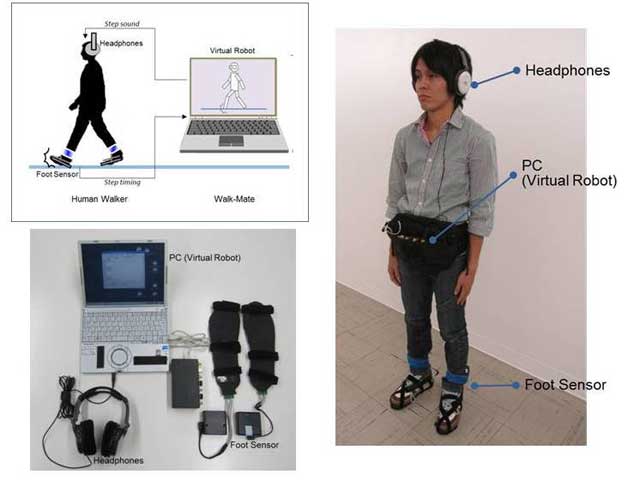
The study was initiated by Prof. Dr. Yoshihiro Miyake back in 2009, when he investigated coupled walking processes between a walking robot and a walking person. Unlike other robotics projects where robotic exoskeletons are used to augment the strength of the wearer, WalkMate system features an auditory feedback which aids in coordination for people suffering from Parkinson’s disease (PD) or hemiplegia.
The system uses the timing of the walking person as a sensory input for the robot and the sound of a walking rhythm as the robot’s output. An algorithm based on travelling wave dynamics is used to control the timing difference between the gathered data and sound signals the device is sending to its wearers.
In a more recent study, Miyake’s research group from the Tokyo Tech’s Department of Computational Intelligence and Systems Science cooperated with researchers at the Max Planck Institute for Human Cognitive and Brain Sciences and the Department of Neurology at Kanto Central Hospital to perform tests on patients with disturbed gait in order to reveal how people adjust their pace in response to the robot’s audible output.
Although the gathered data is limited by facts the PD patient group and the healthy participants were not age- or gender-matched and the test durations were short due to patient’s conditions, the results are promising. PD patients using Walk Mate had healthier looking stride patterns and they achieved a greater stability and synchronization compared to other walking aids that have a fixed rhythm.
Tokyo Tech researchers plan to systematically manipulate the target phase difference between step time and auditory onset, and examine potential effects on walking speed of PD patients in their future research.
The good sides of this easily adjustable non-invasive therapeutic system are its portability, flexibility and low cost, with great potential to improve the mobility, stability, and quality of life of people with disturbed gait. The bad side is that you would need some time to get used to the system and the fact you receive additional auditory information which could be a bit distracting. On the other hand, we tend to adapt and I believe that the continuous use of the system should increase the comfort of its usage.
For more information about research from 2009, you can read the paper published in the IEEE Transactions on robotics: “Interpersonal Synchronization of Body Motion and the Walk-Mate Walking Support Robot” [685KB PDF].
For more information about recent tests, you can read the paper published in the PLoS ONE: “Interactive Rhythmic Auditory Stimulation Reinstates Natural 1/f Timing in Gait of Parkinson’s Patients” [374KB PDF].








Nice effort, although I believe that there will be a long lasting invasive way to solve this problem with new breakthroughs in science and biomedicine.
you’re in reality a excellent webmaster. The website loading pace is incredible. It seems that you are doing any distinctive trick. In addition, The contents are masterpiece. you’ve performed a great job in this subject!