
Worm biomimicry inspires more flexible slithering robots
 A researcher from the University of Leeds has drawn inspiration from nature to build a robotic worm that can wiggle its way around obstacles. Dubbed worm-bot, the robot is modeled after the Caenorhabditis elegans nematode – a minuscule free-living worm that uses a very simple nervous system of just over 300 neurons to control the way it moves and functions.
A researcher from the University of Leeds has drawn inspiration from nature to build a robotic worm that can wiggle its way around obstacles. Dubbed worm-bot, the robot is modeled after the Caenorhabditis elegans nematode – a minuscule free-living worm that uses a very simple nervous system of just over 300 neurons to control the way it moves and functions.
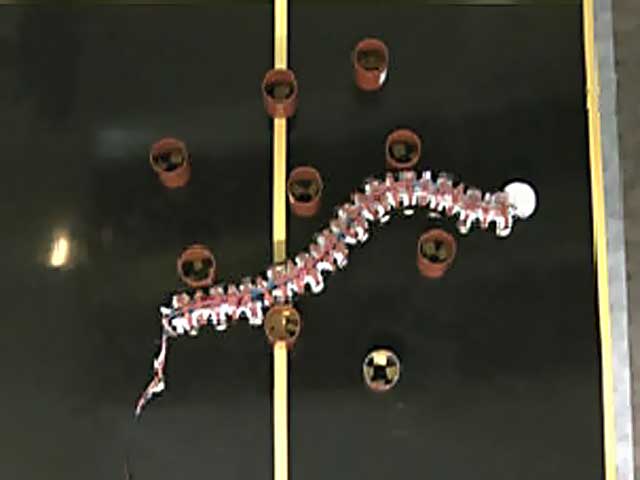
Designed by Dr Jordan Boyle, worm-bot is 2,000 times larger than the 1 mm-long C. elegans worm (2 meters or 6.5 feet) and its diameter is 16 centimeters (6.3 inches). Unlike its natural counterpart (which doesn’t have a skeleton), the robot has a snake-like rigid ‘backbone’ made of 12 articulated nylon-based plastic segments which can swing from side to side using a geared motor in its centre. However, a series of springs along the length of its body provide the robot with worm-like flexibility.
Snake-like robots are typically propelled forwards by a wave-like movement that their control system has worked out in advance. When they meet an obstacle, the control system senses that something is in the way it wants to move and directs the robot to change its shape accordingly. In contrast, the worm-bot doesn’t need to know how an obstacle alters the shape of its body in order to carry on – it just keeps on going.
“The combination of the flexible control system and the ‘bendy’ body means that the robot adapts blindly to any obstacles that are preventing it from moving forward. Basically the worm-bot is thinking: ‘go, go, go!'”, said Boyle, who carried out the work at the University of Leeds School of Computing and Mechanical Engineering.
The system driving the robot forward is essentially the same as that of the C. elegans nematode – though with a few tweaks to improve the robot’s performance. As a result, the worm-bot deals with obstacles in a very different way to other flexible, floor-crawling robots.
“At the moment, this does mean that the worm-bot has no idea where it will end up so there is a small chance that it might get stuck. A future version would just need to include an extra layer of ‘intelligence’ to the control system that could step in if the robot needed extra help to wriggle its way out of a corner”, Boyle added.
Its developer envisions the robot being used by search and rescue crews to send heat-seeking equipment into collapsed buildings or deliver aid to trapped survivors.
“Given the correct ‘skin’, the next version of this robot should also be able to deal with different environments. For example, it should be able to swim through water or crawl through snow or mud, even if it has to weave its way between natural obstacles, such as boulders or trees”, said Boyle.








Excellent adoption of Bio mimicking.
Dr.A.jagadeesh Nellore(AP),India
E-mail: anumakonda.jagadeesh@gmail.com