
A small spherical inspection robot for nuclear reactor underground pipes
Currently, nuclear powerplant inspectors use indirect methods to monitor buried piping by generating a voltage gradient to identify areas where pipe coatings may have corroded, and by using ultrasonic waves to screen lengths of pipe for cracks. A team of researchers from MIT is developing small, egg-sized robots designed to inspect nuclear reactor underground pipes for signs of corrosion.
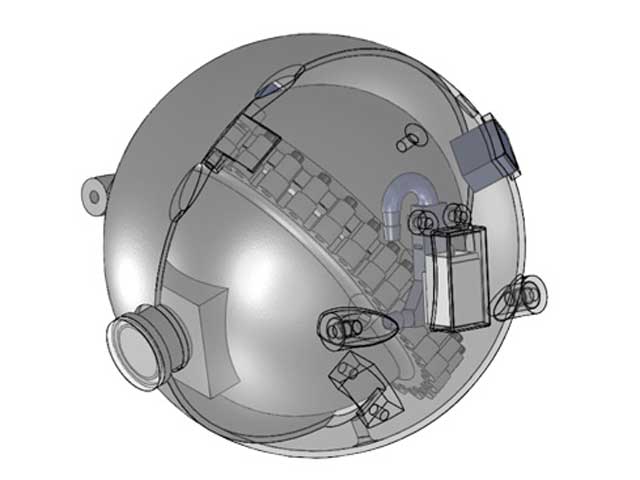
Harry Asada, the Ford Professor of Engineering in the Department of Mechanical Engineering and director of MIT’s d’Arbeloff Laboratory for Information Systems and Technology, and his graduate student, Anirban Mazumdar, decided to make the robot in a shape of a smooth sphere. There are no propellers or rudders, since a robot equipped with external thrusters or propellers could easily jam in reactor’s complicated networks of pipes and joints.
The group developed a propulsion system capable to harness the considerable force of water which flows through a reactor. They came up with a special valve for switching the direction of a flow with a tiny change in pressure and embedded into a tree structure to create a multi-axis thrust mechanism network of the Y-shaped valves within the hull of the small robot. Unlike traditional screw thrusters, these valves have improved dynamic performance in switching the jet stream direction.
Depending on the direction they want their robot to swim, the researchers can close off various channels to direct the water through a specific valve. The high-pressure water pushes open a window at the end of the valve, rushing out of the robot and creating a jet stream that propels the robot in the opposite direction.
As the robot navigates through a pipe system, the onboard camera takes images along the pipe’s interior. The team installed a two-axis gimbal in the body of the robot, which enables it to change its center of mass and stay stationary while the camera fixed to the outside of the robot pans and tilts.
The original plan was to retrieve the robot and examine the inspection images afterward, but the team is working to equip the robot with wireless underwater communications. They are going to use laser optics to transmit images in real time, and expect it to be efficient on distances of up to 100 meters (nearly 330 feet).
Asada envisions the robots as short-term, disposable patrollers, able to inspect pipes for several missions before breaking down from repeated radiation exposure.








Leave your response!