
Machine Metabolism project – robots capable to climb and build structures
 In one of our previous articles, we wrote about two ideas that employ robots building construction, but researchers from Cornell University came up with a different approach in a project named Machine Metabolism – Truss Structure Manipulation using Robots. The project involves a robotic system capable to break down modular elements and reuse them to create new things.
In one of our previous articles, we wrote about two ideas that employ robots building construction, but researchers from Cornell University came up with a different approach in a project named Machine Metabolism – Truss Structure Manipulation using Robots. The project involves a robotic system capable to break down modular elements and reuse them to create new things.
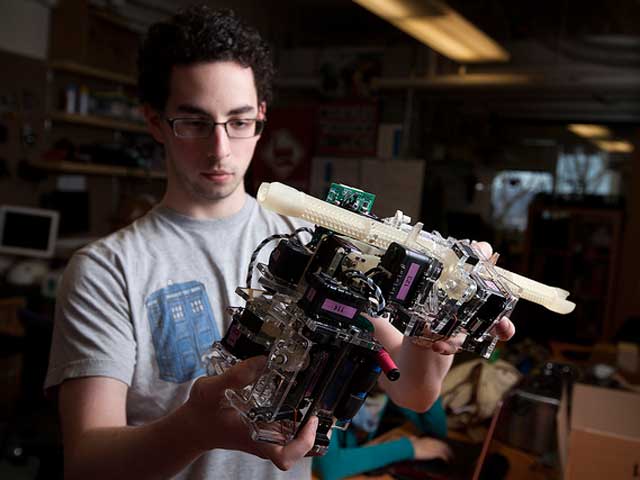
Led by Hod Lipson, researchers from Cornell’s Creative Machines Lab started development of robot that is capable to undertake such actions back in 2009. Its third and latest iteration has 9 degrees of freedom and it’s capable to reconfigure simple 3D truss structures. A special 3D printed gearing system allows the robot to perform bi-directional movement. Its onboard power system allows robot’s autonomy, while reflectivity sensors allow it to maneuver accurately without explicit commands and help it identify its location on the structure.
Specially designed gears and joints of the truss pieces allow it to assemble and disassemble the structure as it climbs. The design of the truss pieces, which have ridges and specially designed locks which allow the robot to manipulate with them would need to be standardized and devised in a way that allows greater freedom in design and usability.
“We are exploring a smarter way to allow the assembly, disassembly and reconfiguration of structures”, said Lipson, Cornell University associate professor of mechanical and aerospace engineering and of computing and information science.
The researchers envision future buildings made out of building blocks that are modular and designed in a way that allows the robots to build or reconfigure structures with greater ease and efficiency. While the short-term investment in materials would be more costly, the researchers expect that the longer-term ability to reuse and adapt these materials would be worthwhile.
Before we witness those changes in building materials manufacture, these robots could be used along with other robots that are designed to perform tasks such as bricklaying and welding, these robots could be used to distribute building material. Among its other near future applications, the robot could be used to perform autonomous construction of radio towers in order to eliminate work hazards involved in their deployment, as well as to perform repairs on space stations.
In meantime, the researchers are devising genetic algorithms that are capable of performing reconfigurations of these structures to fulfill given functional requirements. They are also developing new software that will allow the robot to map an entire structure independently, deduce absolute position, and determine a reconstruction method independently. The ultimate goal of the Machine Metabolism project is to devise a system that would enable creation of kinematic structures and enable automated design.
The project is part of a National Science Foundation Emerging Frontiers in Research and Innovation grant jointly awarded to Lipson at Cornell, Daniela Rus of the Massachusetts Institute of Technology, Mark Yim of the University of Pennsylvania, and Eric Klavins of the University of Washington.
The robot’s design is detailed in a paper accepted by IEEE Robotics and Automation, and it will be linked after an article update within the comments since it is due to appear later online and in print. Its co-authors include former visiting scientist Franz Nigl, former visiting Ph.D. student Shuguang Li, and undergraduate Jeremy Blum ’12.








Leave your response!