
Modular robots – SuperBot
 One of the most challenging issues for human-centered long-range space exploration is performing complex tasks in environments that are not human-friendly. These tasks range from activities such as inspection, maintenance, and assembly, to surface landing, exploration, and habitat-construction. A robotic solution is essential to this challenge, however, the traditional approach of building separate robots for separate tasks aren’t adequate for affordable and efficient space exploration. The required robotic tasks are diverse and the need to pack diverse functionalities into a single launch volume increase. In one of our previous articles we started the subject of modular robots from Festo and in this article we’re going to write about SuperBot.
One of the most challenging issues for human-centered long-range space exploration is performing complex tasks in environments that are not human-friendly. These tasks range from activities such as inspection, maintenance, and assembly, to surface landing, exploration, and habitat-construction. A robotic solution is essential to this challenge, however, the traditional approach of building separate robots for separate tasks aren’t adequate for affordable and efficient space exploration. The required robotic tasks are diverse and the need to pack diverse functionalities into a single launch volume increase. In one of our previous articles we started the subject of modular robots from Festo and in this article we’re going to write about SuperBot.
“You could build a lot of different robots where each does different things, but that would be too expensive,” said Wei-Min Shen, director of the Polymorphic Robotics Laboratory at the University of Southern California.
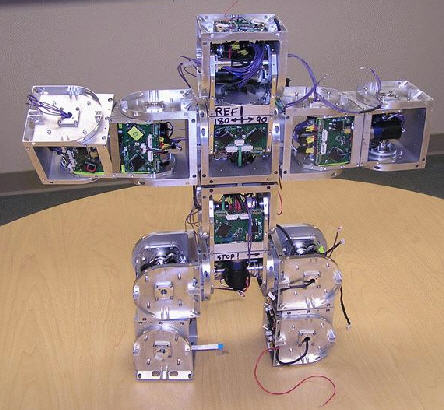
SuperBot consist of Lego-like autonomous robotic modules that can reconfigure into different systems for different tasks. Examples of configurable systems include rolling tracks or wheels (for efficient travel), spiders or centipedes (for climbing), snakes (for burrowing in ground), long arms (for inspection and repair in space), and devices that can fly in micro-gravity environment.
“Each module is a complete robotic system and has a power supply, micro- controllers, sensors, communication, three degrees of freedom, and six connecting faces (front, back, left, right, up and down) to dynamically connect to other modules.”, said Shen.
SuperBot can also demonstrate self-repair and self-assembly, because each module represents an independent robot that communicates to other modules using infrared and radio communication. The modules constantly assess the situation see what other modules are nearby, and whether they should act as an arm or a leg for the combined SuperBot.
“One of our demonstrations is that you can have a robot and cut it in half, so it becomes two independent snakes,” Shen said. “There’s no fixed central brain.”
However, a number of steps remain before SuperBot can act as a fully autonomous being that makes decisions on its own. Creating artificial intelligence (AI) that can make higher-level decisions in traditional robots has already proved challenging, and modular robots have the added complexity of deciding what represents the best shape or size in any given environment.
One solution may involve looking to biology. Shen’s lab has put forth the idea of “digital hormones” that would simulate the way in which hormones affect the mind and body. Some modules could flood certain signals to all the others, in order to communicate instructions such as whether to transform into a walking or rolling SuperBot.
The impact of SuperBot is to offer an effective and affordable solution based on modularity and re-configurability. The concepts can also be applied to other desirable system features such as reusable designs, modularity, autonomy and the easing of logistics. The interchangeability of robotic components will decrease the need for redundant parts and enhance mission reliability and safety by allowing robust re-configurability in times of failure.








Leave your response!