
New steps in surgery – Minimally Invasive Robotic Surgery
 Conventional minimally invasive surgery (MIS) is performed through small incisions in the patient’s skin, preserving healthy tissue. The surgeon works with long slender instruments, and is separated from the operation area. This arrangement challenges the surgeon’s skills due to lost hand-eye-coordination and missing direct manual contact to the operation area. Therefore, many sophisticated procedures cannot be performed in this manner yet.
Conventional minimally invasive surgery (MIS) is performed through small incisions in the patient’s skin, preserving healthy tissue. The surgeon works with long slender instruments, and is separated from the operation area. This arrangement challenges the surgeon’s skills due to lost hand-eye-coordination and missing direct manual contact to the operation area. Therefore, many sophisticated procedures cannot be performed in this manner yet.
In case of minimally invasive robotic surgery (MIRS) the instruments are not directly manipulated anymore. Instead, they are held by specialized robot arms and remotely commanded by the surgeon who comfortably sits at an input console. The surgeon virtually regains direct access to the operating field by having 3D endoscopic sight, force feedback, and restored hand-eye-coordination.
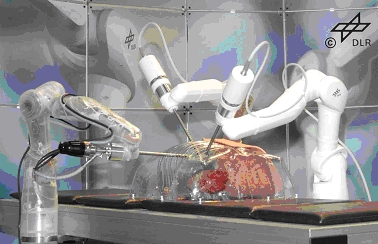
The DLR telesurgery scenario MIROSURGE includes an input (or master) console as well as a teleoperator consisting of 3 MIRO surgical robots. Usually, two MIRO robotic arms carry surgical instruments equipped with miniaturized force/torque sensors to capture reaction forces with manipulated tissue. One more MIRO can automatically guide a stereo video laparoscope. Both the stereo video stream and the measured forces are displayed to the surgeon at the master console. That way, operators are not limited only to sight and they can also feel what they are doing. An Omega.7 input device is used as force display.

Aside from classic tele-robotics control, a soft (”hands-on”) robotics feature is integrated into the workflow of the minimally invasive teleoperation: since all joint units of MIRO integrate both position and torque sensors, the robot can be used in impedance-controlled mode, allowing sensitive movements of the robot effected by the surgeon.
The orientation of the robot’s end effector remains constant due to programmed high rotational stiffness, while its position can be adjusted by the surgeon simply by touching and moving the robot arm. Furthermore, the seven degrees of freedom (DoF) design of the MIRO robot arms allows for flexible configuration in the Nullspace. Due to the soft robotics capabilities, the MIS instrument can easily be inserted into the patient with constant tip rotation.
To achieve versatility, the robotic system is optimized and designed for various applications in minimally invasive and open surgery. For example, in a one-arm application for assisted minimally invasive manual surgery, the MIRO robot can be used to automatically guide the endoscope such that the instruments are always in view. A biopsy application was implemented with the KineMedic robot, a previous prototype.
“Our ultimate ambition is robot supported surgery on the beating heart. The application of the heart-lung machine would become obsolete for a whole variety of procedures that way. Collaterally, the very traumatizing effects of the heart-lung machine on the patient could be avoided (e.g. blood contact with extrinsic surfaces, inevitable blood clotting attenuation, typical generalized inflammation reaction).”

However, before motion compensation in beating heart surgery can be performed, there are a few drawbacks which need to be solved as organ motion arising from the patient’s respiration or heart beat or online prediction which is necessary to overcome the delays that encounter due to data transfer or processing.
These semi (and in future probably mostly) automated robots are going to give us new possibilities, better sterility of equipment and more steady hands, enabling better surgeries and even participation of previous generation of surgeons that can provide important data for the improvement of similar systems. It might all look high-tech and new, but so did the medical instruments of medieval ages when they were invented.








Leave your response!