
You can get your own Kilobot thanks to K-Team Corporation
 In our previous articles, we already wrote about many examples of swarm robotics, but the researchers from Harvard University stand out by its design simplicity and low cost which is suitable in experiments related to algorithms developed for robotic swarms. Their goal to create a platform that could be produced quickly and inexpensively to form a swarm with hundreds or even thousand robots led to the platform name – Kilobot.
In our previous articles, we already wrote about many examples of swarm robotics, but the researchers from Harvard University stand out by its design simplicity and low cost which is suitable in experiments related to algorithms developed for robotic swarms. Their goal to create a platform that could be produced quickly and inexpensively to form a swarm with hundreds or even thousand robots led to the platform name – Kilobot.
The robot is developed by members of the Self-Organizing Systems Research Group led by Radhika Nagpal, the Thomas D. Cabot Associate Professor of Computer Science at Harvard School of Engineering and Applied Sciences and a Core Faculty Member at the Wyss Institute for Biologically Inspired Engineering at Harvard, and it is comprised out of parts which cost less than $15 in total.
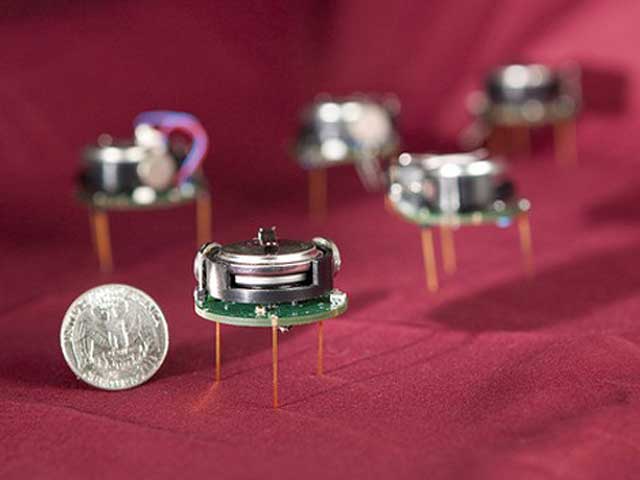
Kilobot has a diameter of 33 mm (1.3 inches) and its height is 34 mm (including the legs). These quarter-sized robots stand on three rigid toothpick-like legs which are 20 mm (0.75 inches) long. In order to move, the robot uses 2 vibration motors (each motor can be set to 255 different power levels) that enable it to rotate or move forward.
It is powered by a small rechargeable lithium ion battery. Although small in size, due to simplicity of Kilobot’s design, the battery can power the robot for more than 3 hours. The robot has a built-in charger, which charges the onboard battery when +6 volts is applied to any of the legs, and GND is applied to the charging tab.
In order to provide different signals and states, each Kilobot has a red/green/blue (RGB) LED with 3 levels of brightness control. Robot’s underside has a wide angle infra red transceiver (device capable to act transmitter and a receiver) which is pointed downwards in order to enable the robot to sense distance and communicate to its neighboring robots. It can communicate to other Kilobots that are 7 cm (2.75 inches) away, and sense how far they are by determining the strength of received signal.
Harvard researchers developed an overhead controller which uses infrared light to reprogram larger groups of robots simultaneously. It takes up to 40 seconds to perform this process and the microcontroller located at the underside of the robot enables it to be fully autonomous. It can store up to 32K of program memory and it uses 1K EEPROM to store calibration values and other non-volatile data.
This approach allows a single user to easily administer the operation of a large Kilobot collective, including programming, powering on, and charging all robots. The low cost and simplicity, allow the algorithms being developed to be tested outside the usual computer simulation environment and offer something observable to students who are starting to learn robotics.
The platform has been licensed to K-Team Corporation, a Swiss manufacturer of high-quality mobile robots for use in advanced education and research.
Research related to better robotic swarm algorithms could lead to better performance of future swarm robots used in search and rescue missions, environment monitoring where robots could report about wildfires or remove contaminants, resource mining and transport (similarly to ants or bees), or even self-assemble to form support in damaged structures.








FYI… for folks looking to build your own “steerable vibrobot” (like the Kilobot), there is a rich history of such devices from the hobbyist community: http://www.hizook.com/blog/2011/09/08/infrared-remote-controlled-rc-steerable-vibrobot-created-naghi-sotoudeh
For the dedicated electronics hobbyist, you probably have all the necessary parts just laying around.
Don’t think it’s that hard to be built, and the point of this is to enable non-virtual testing of the algorithms, but it still requires reflective and relatively flat surface.
Could be useful in introductory courses or in promotion of robotics and programming among the children.
Michael Rubenstein, Christian Ahler, and Radhika Nagpal at the Self-Organizing Systems Research Group have used Kilobots to build their own little robot army.
As you can see in the first video bellow, the group used 100 Kilobots to employ their visible light sensors to perform phototaxis (light seeking).
http://www.youtube.com/watch?v=QQM2SDf8TH8
In the following video, the researchers revealed how they employed Kilobots to perform cooperative task where they carried objects with different shapes.
http://www.youtube.com/watch?v=qAjWL6AyIeE